The BugWright2 project
Autonomous Robotic Inspection and Maintenance on Ship Hulls
What is the BUGWRIGHT2 project about?
Overview
BUGWRIGHT2 is a collaborative project co-funded by the European Union’s Horizon 2020 Research and Innovation programme under Grant Agreement No. 871260.
The objective of BUGWRIGHT2 is to bridge the gap between the current and desired capabilities of ship inspection and service robots by developing and demonstrating an adaptable autonomous robotic solution for servicing ship outer hulls.
The project consists of a large consortium bringing together not only the technological knowledge from academia but the complete value chain of the inspection robotic market:
- two SMEs
- one class society to evaluate the use of these technologies in the certification processes
- a marine service provider
- two harbours to provide access to ships
- one shipyard to deploy the system within a maintenance framework
- two ship-owners
In addition, specialists in maritime laws and workplace psychologists will ensure that the digitalisation of this market sector is designed around user acceptance. Finally, a specialist in innovation will lead the dissemination and exploitation activities.
KEY FACTS
- Grant Agreement No. 871260
- Start date: 01 January 2020
- End date: 31st March 2024
- 4 years project
- 21 Partners
- 10 Countries
- Total cost: € 9 952 745.63
- EU funding: € 8 999 807.50
- Project Coordinator: Cédric Pradalier (CNRS)
KEYWORDS
- Robotics for inspection and monitoring,
- Robotic system development,
- Automation and control systems
- Ship inspection,
- Maritime services,
- Multi-robot system,
- Virtual-reality,
- Acoustics
How do we plan on implementing autonomous inspection?
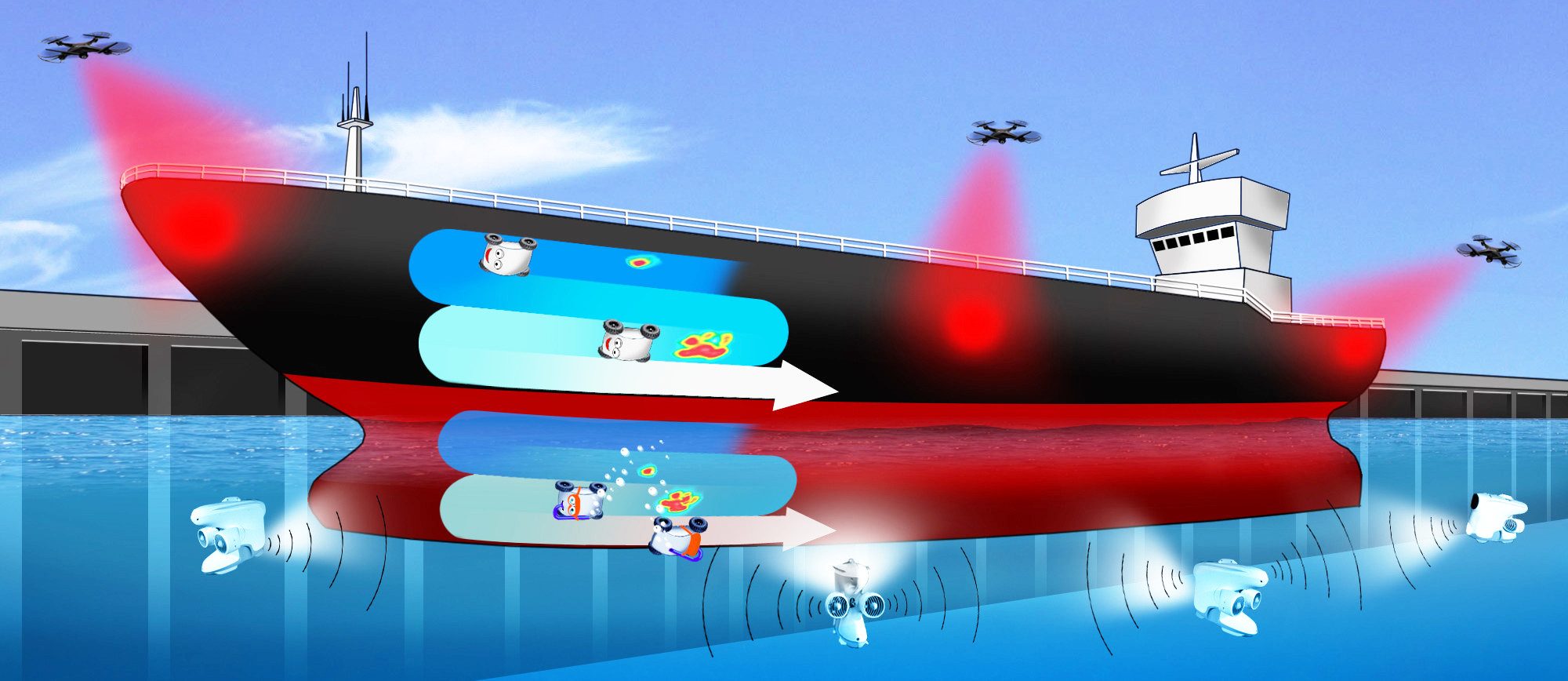
By combining the survey capabilities of autonomous Micro Air Vehicles (MAV) and small Autonomous Underwater Vehicles (AUV), with teams of magnetic-wheeled crawlers operating directly on the surface of the structure, the project inspection and cleaning system will be able to seamlessly merge the acquisition of a global overview of the structure with performing a detailed multi-robot visual and acoustic inspection of the structure, detecting corrosion patches or cleaning the surface as necessary – all of this with minimal user intervention.



The detailed information provided will be integrated into a real-time visualization and decision-support user-interface taking advantage of virtual reality technologies. Although ships are the targeted application, BugWright2 technology may be easily adapted to different structures assembled out of metal plates, and in particular to storage tanks, our secondary application domain.
Learn about our 3 angles of approach
- Development of the technologies towards a clearly defined application
- Development of demonstrators
- Short path to market, strong industrial implication, less fundamental research Field Robotics
- Autonomous navigation on and around a ship hull, above and below water
- Visual and acoustic mapping for defect detection
- Multi-robot operations
- Virtual Reality and Augmented Reality for decision support
- Deployment in harbours and shipyards
- Impact on inspection process: experts in certification and marine services
- Impact on regulations world-wide: experts in maritime laws
- Impact of digitalization on trust: expert in psychology
Our methodology
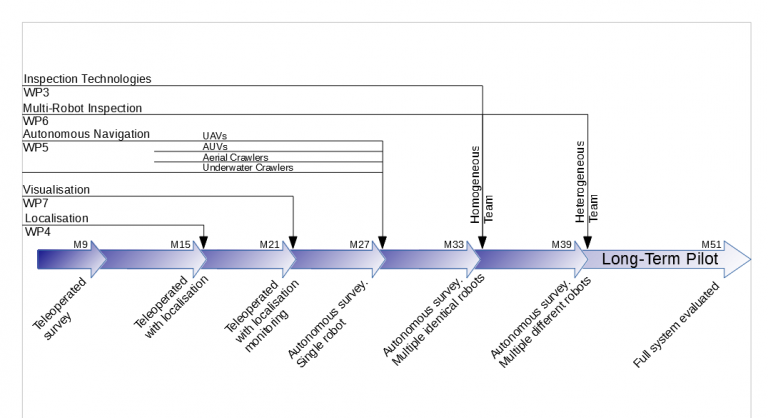
Pilot – Teleoperated survey
- Off-the-shelf robots have been delivered to the end-users
- End-users have been trained to operate the inspection system
- End-users started integrating teleoperated surveys in their workflow
Pilot – Integration localisation
- Off-the-shelf localisation system have been integrated into the pilot robots
- End-users trained on the localisation systems
- End-users using robots with localisation capabilities in teleoperated mode
- Localise inspection results are available
Pilot – Real-time monitoring
- A real-time immersive monitoring interface has been delivered and can provide live feedback on the robot progress and measurements
- End-users trained on the monitoring interface
- End-users using the monitoring interface
Pilot – Autonomous survey with MAVs
- Autonomous visual survey with MAVs have been demonstrated to end-users
- End-users trained and collecting visual surveys
Pilot – Autonomous survey with AUVs
- Autonomous visual survey with AUVs have been demonstrated to end-users
- End-users trained and collecting visual surveys
Pilot – Autonomous survey with Crawlers (aerial sensor suite)
- Autonomous survey with crawlers above water have been demonstrated to end-users
- End-users trained and collecting visual and acoustic surveys
Pilot – Autonomous survey with Crawlers (underwater sensor suite)
- Autonomous survey with crawlers underwater have been demonstrated to end-users
- End-users trained and collecting visual and acoustic surveys
Pilot – Autonomous survey with multiple identical robots
- Autonomous surveys with an homogeneous team of multiple robots have been demonstrated to the end-users, for the four robot modality
- End-users are trained and can use a multi-robot team in at least one modality
Pilot- Autonomous survey with an heterogeneous robot team
- Autonomous survey with multiple robots of different types have been demonstrated to the end-users
- End-users have evaluated the multi-robot system in the field
Project completed
- All developments finalised and integrated
- Last integration week has been carried out
- All innovated-related activities have been completed
- All evaluations have been carried out
- All scientific results have been published or submitted in at least 30 scientific papers at relevant conferences or journals
- Final public demonstration
- All deliverables have been submitted
